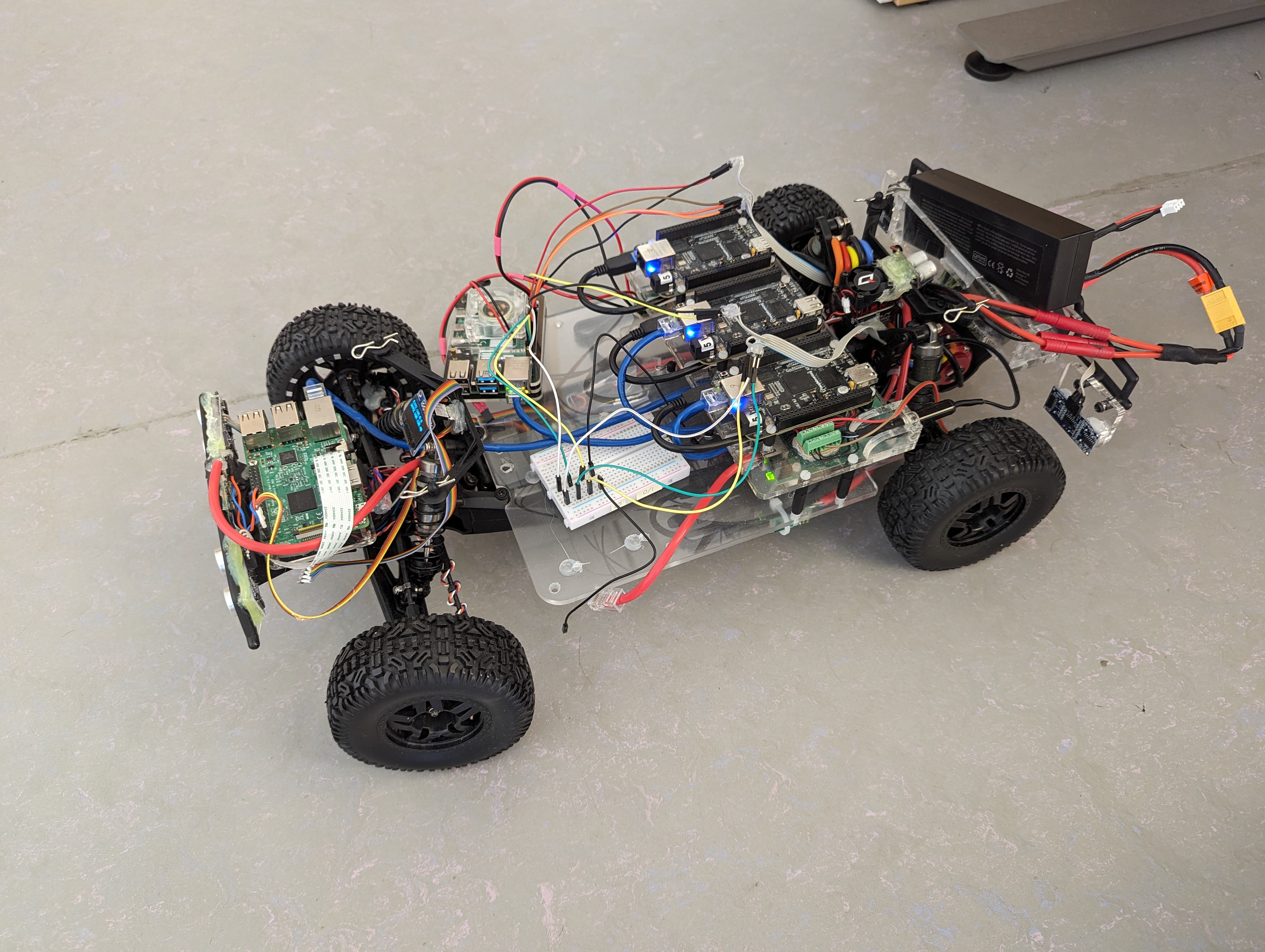
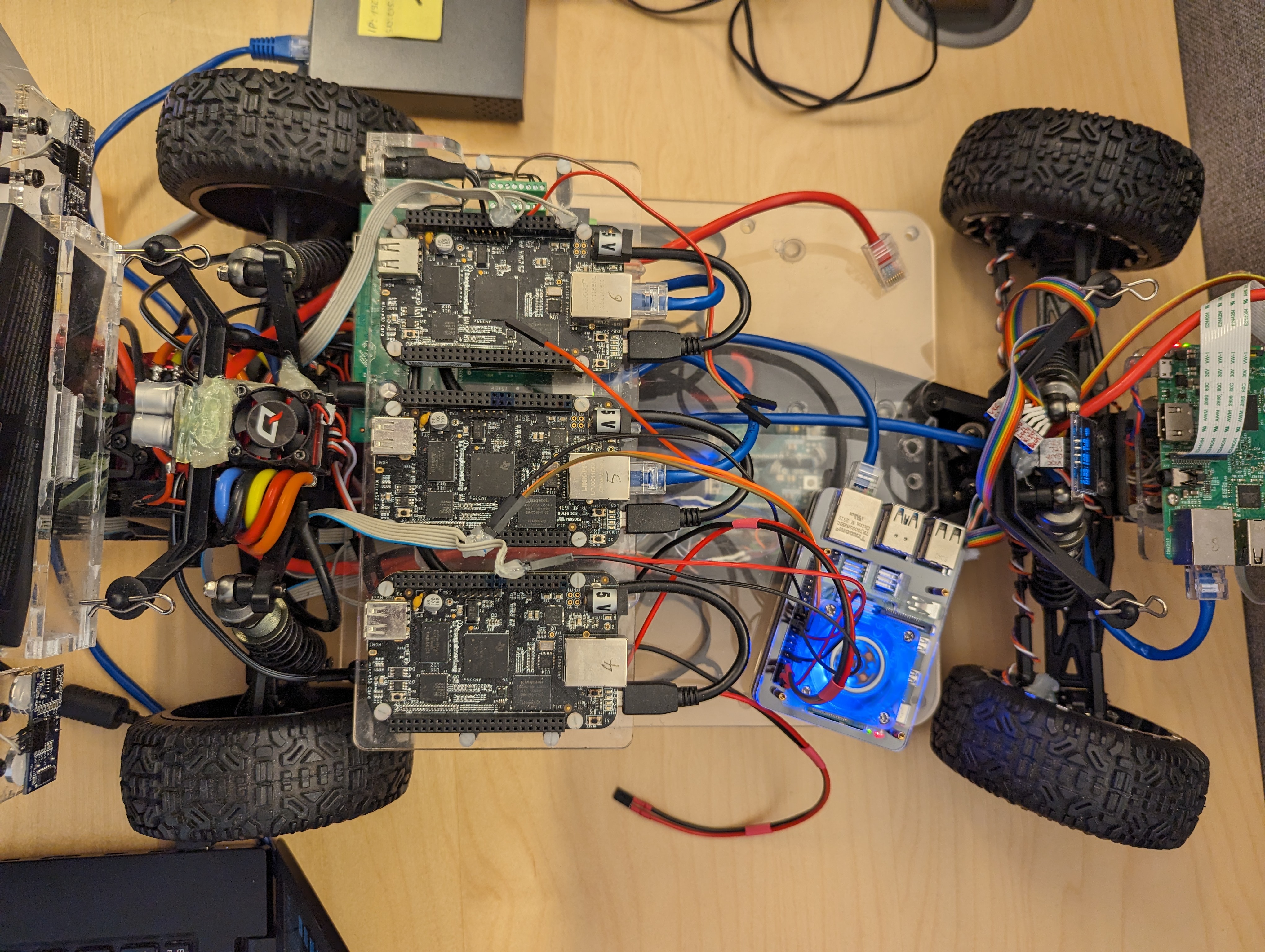
RC car with ROS
Project attribution: Project done solo.
Source: The project’s files are available here.
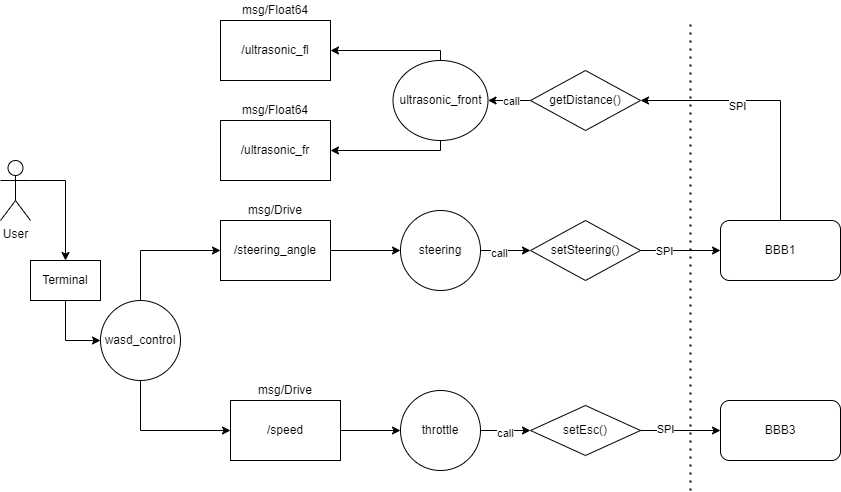
Short description: ROS architecture with SPI back-end for RC car.
Technologies: ROS, SPI, C++, Raspberry Pi, BeagleBone
What I did: I designed the ROS2 architecture and deployed it on a Raspberry Pi to control the car’s throttle and steering with SPI. I also processed ultrasonic sensor information.
ROS