DuckieBot with ROS & YOLO
Project attribution: Project done with Ahmed Ghanem.
Source: The project’s files are available here.
Short description: DuckieBot with ROS2 and YOLOv5
Technologies: Python, ROS2, YOLOv5
What I did: I assembled the DuckieBot, extended its ROS2 architecture to use a YOLOv5 model, I made a custom dataset and trained YOLOv5 on it.
We assembled a Duckiebot as part of the Embedded Visual Control course at TU Eindhoven.
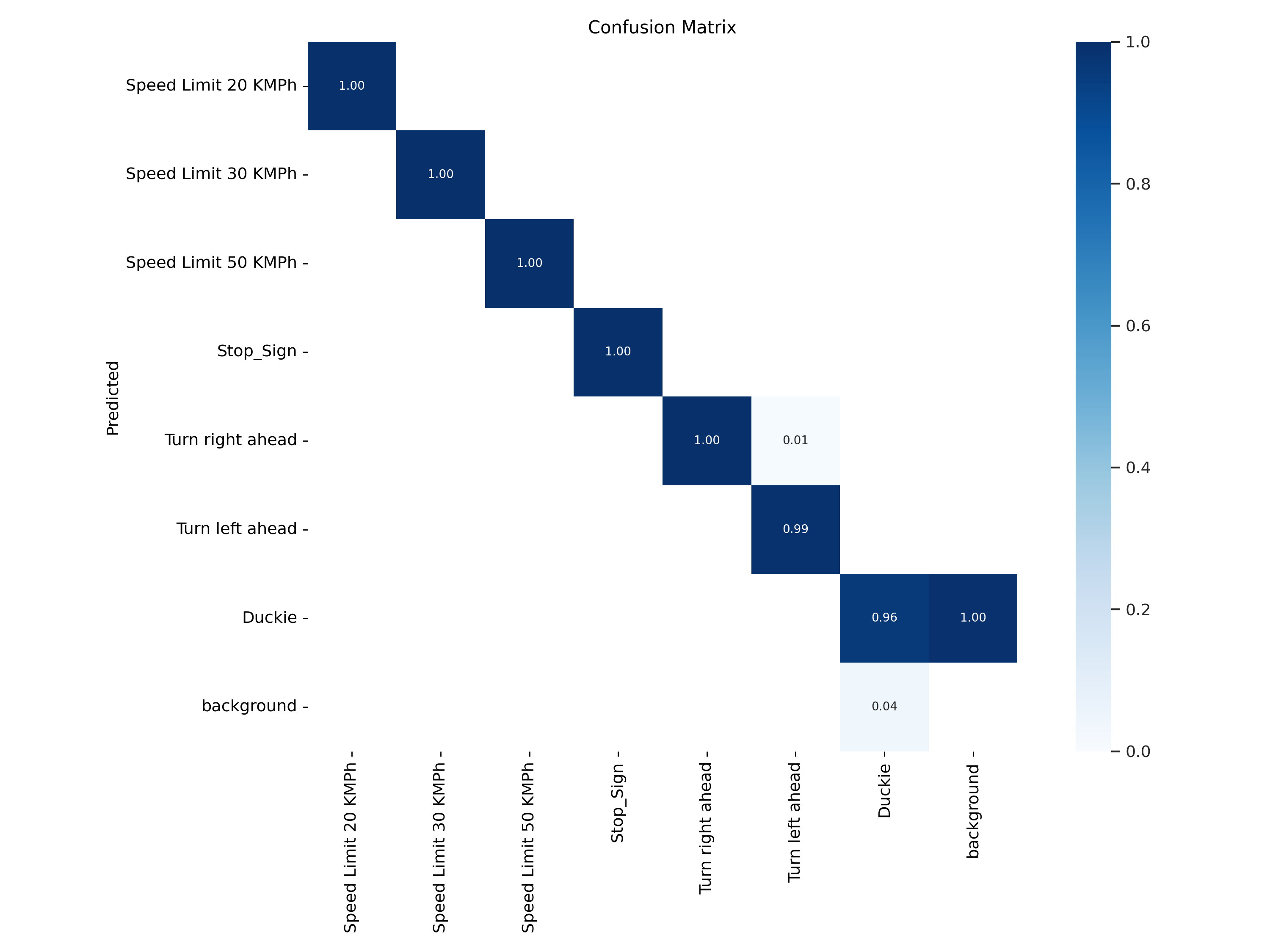
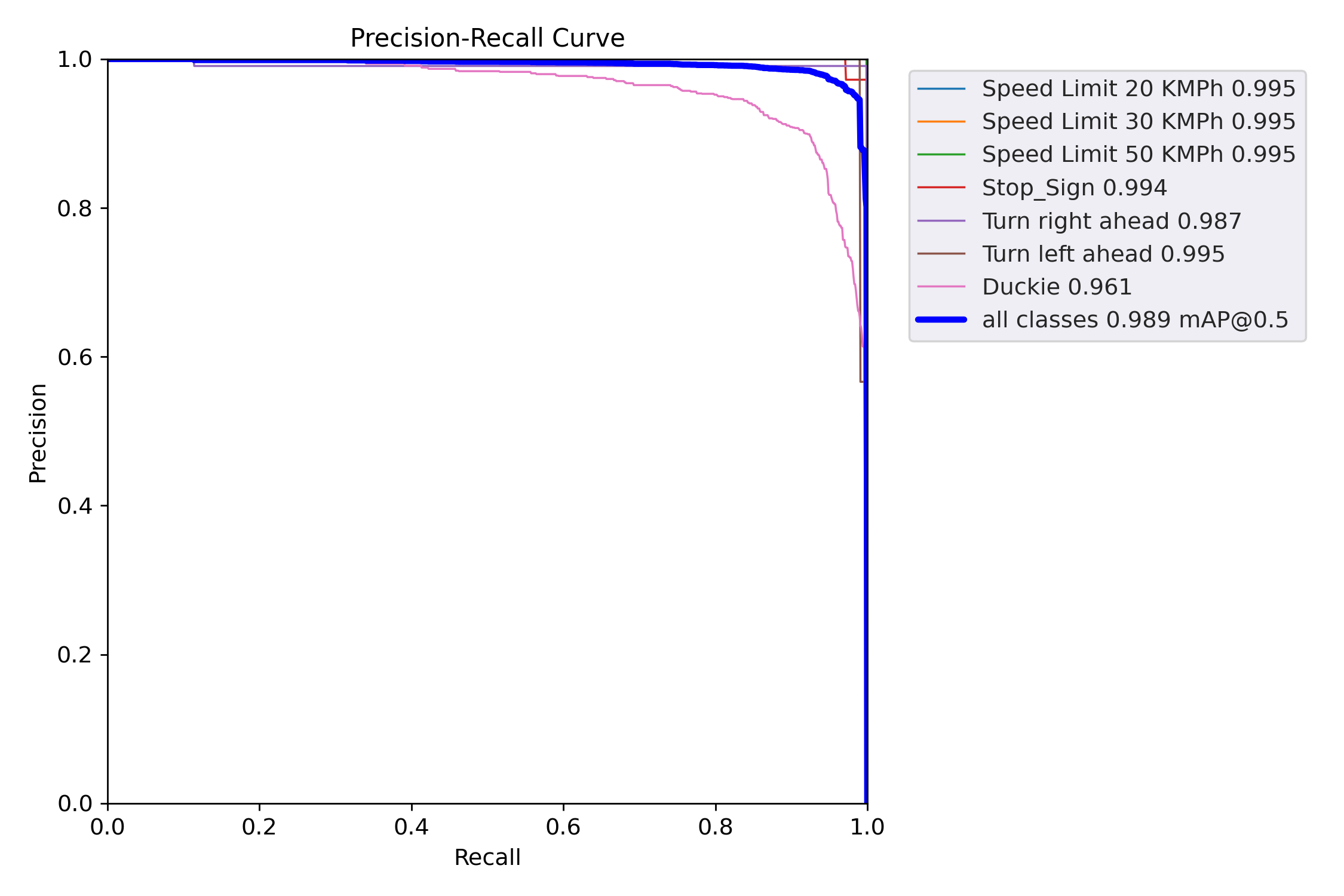
We trained a YOLOv5 computer vision model on a custom dataset with traffic signs. Initially, we used this traffic signs dataset available on Robotflow. However, I deemed it insufficient for our case, so I extended it by annotating custom traffic signs on our own. You can see the final dataset here. My dataset includes more angles, more distortion, and images that closer resemble the environment that the Duckiebot would drive in. This makes it much more precise in its distinction between particular traffic signs, e.g. 20 km speed traffic sign vs 30 km speed traffic sign.
DuckieBot
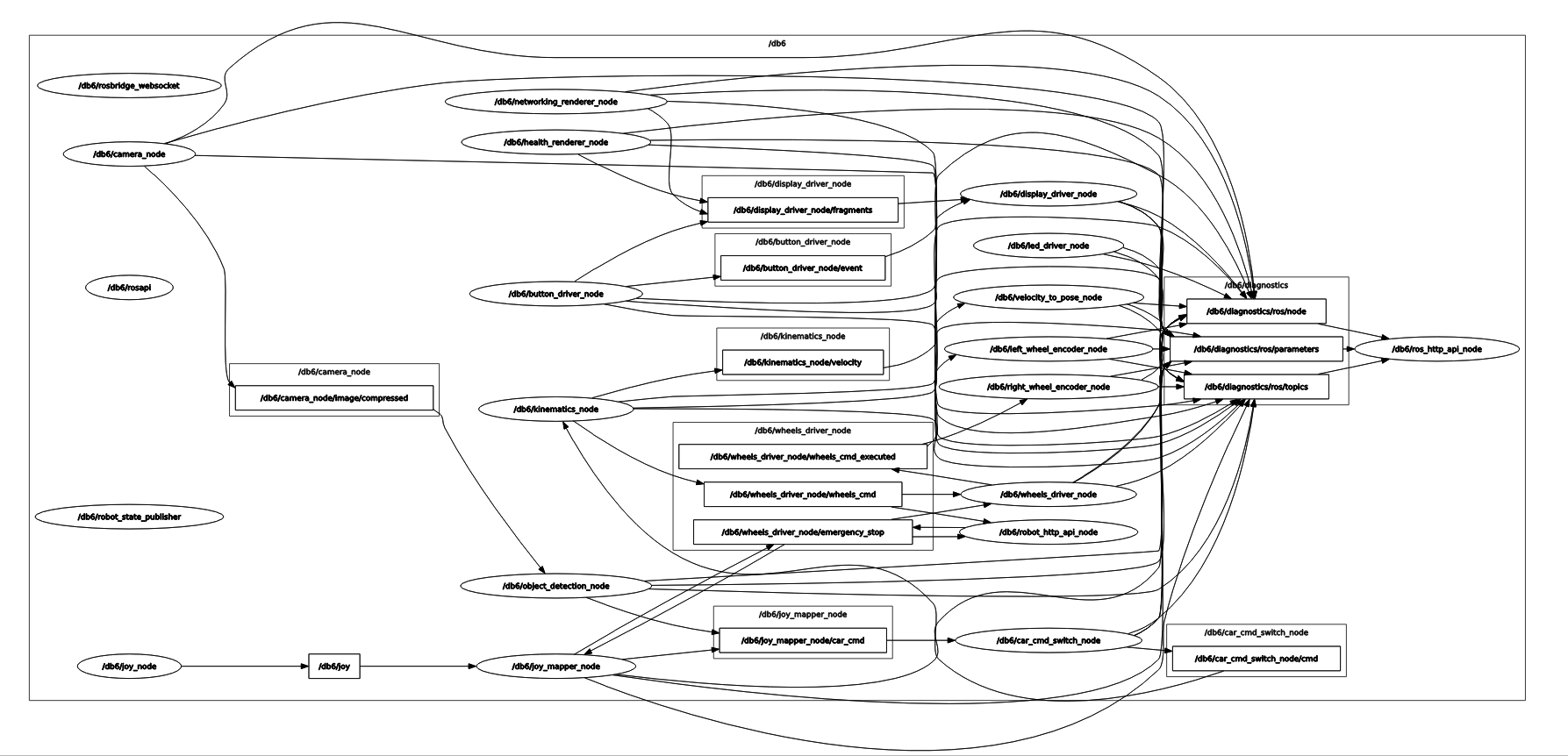
ROS
YOLO model